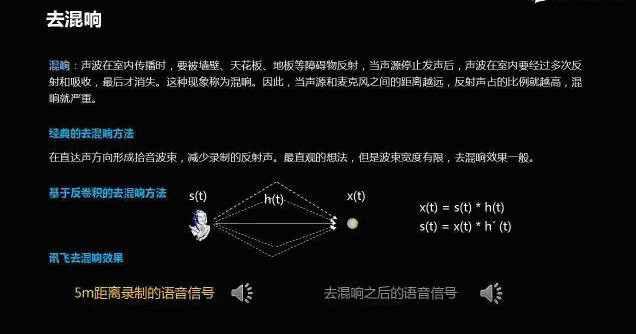
�����ָ�����҃�(n��i)�����r(sh��)������Ҫ�����ڡ��컨������ذ���ϵK�ﷴ�䣬��(d��ng)Դֹͣ�l(f��)��������������҃�(n��i)Ҫ��(j��ng)�^(gu��)��η�������գ�������ʧ����@�N�F(xi��n)��Q���푡�������������(d��ng)Դ�������L(f��ng)֮�g�ľ��xԽ�h(yu��n)�����������ռ�ı�����Խ����������푾͇�(y��n)�ء�
��(j��ng)���ȥ��푷��������γ�ʰ��������(l��i)�p�ٷ����ͻ��ڷ����e��ȥ��푷���������
����ָ�h(yu��n)���f(shu��)Ԓ�˵���ͨ�^(gu��)�P(y��ng)�����ų���(l��i)�����䷴�����ֱ����˵������L(f��ng)�ռ��ق��ͻ��h(yu��n)�������W(xu��)����Ҫ���F(xi��n)�Ĉ�(ch��ng)�ϰ�����ģ�M�Ԓ����ģʽ�������֙C(j��)����ģʽ�����܇�d�{(l��n)���Ԓ�Ȉ�(ch��ng)����
���ڴ��Ļ��������g(sh��)�y�c(di��n)�����Ȳ��ŵ�����(l��)һ������w����������ǭh(hu��n)�@���w������������Ҫ�����Ķ�ͨ�����������g(sh��)��������O(sh��)������Ⱥ������L(f��ng)һ����x�ܽ���ʹ���߾��x�^�h(yu��n)�����������L(f��ng)��̖(h��o)������Ⱥܵͣ�һ����-10dB~-30dB����
��(j��ng)��Ļ��������������Ǿ��Ի�����̎��������ͨ�^(gu��)�Ǿ��ԵĻ����Ƽ��g(sh��)���@�������˷Ǿ�����r�µ�Ч������
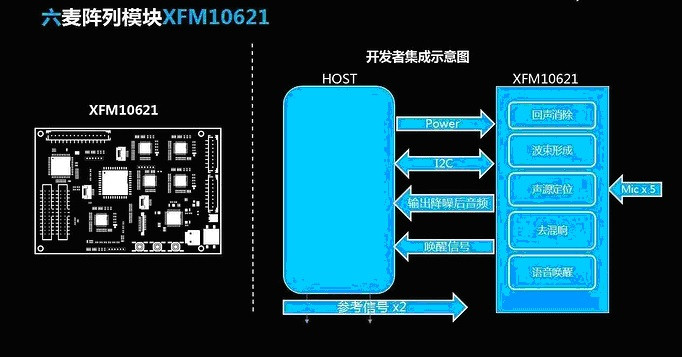
�����L(f��ng)��нY(ji��)��(g��u)�O(sh��)Ӌ(j��)����
Mic �Ŀ������ԽСԽ�����������_(k��i)��Խ��Խ����������ԽСԽ�ã��M����1:1������������c����ֵԽ����������l푵����c(di��n)Խ����l������Ҫ�����c(di��n)��12KHz������������ҲҪ��8KHz���������������ǻ�w����©����������@����?y��n)����������������������λ��?80��������(d��ng)��ǻ��©��r(sh��)��������(hu��)�l(f��)��������������ǵ��l�l�����
���˺����ȵ�ʧ�涼ҪС��������ʧ��С��4%���������ʧ��С��10%�����������ȵ��lʧ���(y��n)��Щ���������(hu��)���^(gu��)10%���������Կ��]���ӞV�����V�����l�ɷ��������
����ǻ�w�����c�����C(j��)��(g��u)������1mm�ľ��x�������ֹǻ���c�C(j��)��(g��u)���|�a(ch��n)��������
���ȹ�Ĥ�Ϸ��c�C(j��)��(g��u)������1.5mm�ľ��x�������Է���Ĥ���(d��ng)�����C(j��)��(g��u)���a(ch��n)����������
�����c�C(j��)��(g��u)���н��|�ĵط��������Ҫ��������������������_�������p���Ч��������ֹ�������(d��ng)�r(sh��)�c�C(j��)��(g��u)����ײ�a(ch��n)����������
�����L(f��ng)����W(xu��)�Y(ji��)��(g��u)�_�J(r��n)����
1.�h(yu��n)�̕�(hu��)�h��F(xi��n)��(ch��ng)�Y(ji��)��(g��u)�O(sh��)Ӌ(j��)�u(p��ng)��
�_�J(r��n)������И�(g��u)�������_�J(r��n)ǻ�����b�Y(ji��)��(g��u)�O(sh��)Ӌ(j��)��������_�J(r��n)�M(j��n)��������ֱ����С�ȣ�
2.�W(xu��)��(sh��)�(y��n)�����Ч���u(p��ng)��-��һ�A��
Ӌ(j��)�������͎�ǻ�Y(ji��)��(g��u)�������L(f��ng)֮�g�����֮�g�C���̶ȣ�����(j��)�����Y(ji��)���_���Ƿ�ͨ�^(gu��)�����
3.�W(xu��)��(sh��)�(y��n)�����Ч���u(p��ng)��-�ڶ��A��
�քe���������͎�ǻ�Y(ji��)��(g��u)�������L(f��ng)��̖(h��o)��������λ��Դ��λ�������������߶�λ�`��С��5��������t�J(r��n)��ͨ�^(gu��)ԓ�(xi��ng)�y(c��)ԇ��
4.�W(xu��)��(sh��)�(y��n)��������u(p��ng)��-�����A��
�քe���������͎�ǻ�Y(ji��)��(g��u)�������L(f��ng)�����(sh��)��(j��)�M(j��n)���R(sh��)�e������Ч�������2%�ԃ�(n��i)���t�J(r��n)���h(yu��n)��(ch��ng)�R(sh��)�e����o(w��)��(w��n)�}���
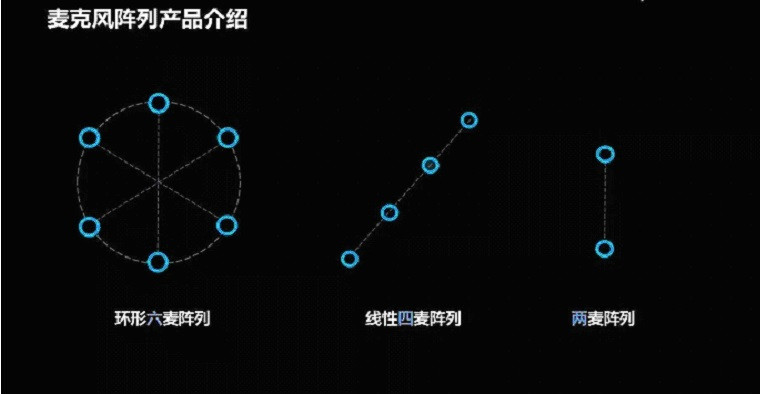
��ͬ��е��m�÷���
�����h(hu��n)����У������h(hu��n)������m���ڑ�(y��ng)�È�(ch��ng)���^���(f��)�s�������̈�(ch��ng)���k���ң���������(du��)�Ƕȶ�λҪ����^�ߣ����������R(sh��)�e��Ҫ���^�ߵęC(j��)���˺ͼҾӮa(ch��n)Ʒ��Q��������
����������У�������������m����܇�d��������{(di��o)���ҕ����(y��ng)���͙C(j��)���˵������b�������֧��0~180��Ƕȶ�λ��������������B�m(x��)���ѵȹ��ܡ�
����������У�����������Ќ�(du��)оƬ����Ҫ���^��������m���ڵͳɱ��������b���Q����������֧�ֻ������������Ƶȹ�������
QA��(w��n)��
1.ԭʼ���l�|(zh��)����(w��n)�}һ�������Щ�����
���܌�(d��o)�µ�ԭ����^�������������Դ��늲��㌧(d��o)�µĵ����^(gu��)������������^(gu��)�(d��o)�µ����|(zh��)�½���������ړ��(d��o)�µ�ʰ��(w��n)�}�����g����^(gu��)��������憖(w��n)�}��ɵĽط���������̖(h��o)���놖(w��n)�}�ȵ���������w��(w��n)�}��Ҫ���w���������
2.�����L(f��ng)���ܛ�˺�ģ�K�ą^(q��)�eһ�������Щ��
�����L(f��ng)���ܛ����Ҫ������������L(f��ng)�����P(gu��n)Ӳ��ģ�K���������ܛ���㷨��(k��)���ɺ��{(di��o)ԇ��(y��u)��������������L(f��ng)���ģ�K�Ƿ��b�õ�Ӳ��ģ�K�����ֱ��ݔ�������L(f��ng)��н��������l��ܛ�˵ĸ���һ����APP��ϵ�y(t��ng)�̼����������������L(f��ng)���ģ�K�ĸ����ɹ̼���������������
3.�ҵĮa(ch��n)Ʒ��(y��ng)ԓ�x��ʲô��(g��u)�͵������L(f��ng)��������
��(du��)����͙C(j��)����һ�����]���������h(hu��n)����������?y��n)�?du��)�Z(y��)���R(sh��)�e��Ҫ���������������h(hu��n)����еIJ�����ʰ�����������m�������(du��)�����͙C(j��)���˺�һЩ�Ҿ߮a(ch��n)Ʒ���]�����������߃������������L(f��ng)����?y��n)������~�R(sh��)�e��(du��)�������l���|(zh��)��Ҫ������(du��)�^��������
4.��������Ч�����ѿ�����ʲôԭ��
����Ҫ�z�酢����̖(h��o)�Ƿ��ɹ��ź�����ǰ����������Ҫ�z���������͵������ȵĽ�������Ƿ����_�����Ҫ�z�������Ƿ����ʧ��Ȇ�(w��n)�}�������






 2753247725
2753247725 13729959073
13729959073

